
Мы часто в раных топиках обсуждаем разделение адресного пространства i8080
на разные страницы на основе битов слова состояния STATUS.
И я всегда начинаю метаться по форуму в поисках этих картинок.
Пусть лучше будут здесь в одном месте, чтобы можно было обсуждать предметно...
Временная диаграмма выполнения обобщенного машинного цикла микропроцессора
i8080 приведена на рисунке:
Увеличить
Заметим, что оба сигнала ПМ и ВД изображены здесь активными условно.
ADDR - ША [0—15] - выходные сигналы тины адресов для адресации
памяти или портов ввода — вывода;
DATA - ШД [0—7] — входные или выходные сигналы двунаправленной шины данных
для обмена данными с памятью или портами ввода - вывода, а также для вывода
из микропроцессора информации о его состоянии;
F1, F2 - С1, С2 — входные периодические сигналы для тактирования микропроцессора;
SYNC - С — выходной сигнал синхронизации, вырабатываемый в начале каждого
машинного цикла и указывающий, что, но шине данных передается информация
о состоянии микропроцессора;
RES - СБР — входной сигнал установки микропроцессора в начальное состояние,
обеспечивающее выполнение программы с команды, содержащейся в ячейке памяти
с адресом 0000Н;
DBIN - ПМ — выходной сигнал, инициирующий выдачу данных периферийными модулями
на шину данных;
WRITE - ВД — выходной сигнал, сопровождающий выдачу микропроцессором информации
на шину данных для записи в периферийные модули;
READY - ГТ — входной сигнал от модулей памяти или портов ввода — вывода,
указывающий на их готовность к обмену данными с микропроцессором;
WAIT - ОЖ — выходной сигнал при ожидании микропроцессором готовности периферийных
модулей;
HOLD - ЗХ — входной сигнал, инициирующий перевод шин адресов и данных микропроцессора
в высокоимпедансное состояние;
HLDA - ПЗХ — выходной сигнал, подтверждающий перевод шин адресов
и данных микропроцессора в высокоимпедансное состояние;
INTE - РПР — выходной сигнал разрешения прерывания выполнения текущей программы;
INT - ЗПР — входной сигнал запроса прерывания.
В каждом такте любого машинного цикла микропроцессор выполняет определенные действия:
T1 — устанавливает код адреса периферийного модуля на шине адресов.
Т1/Т2 — выводит информацию о своем состоянии (STATUS) по шине данных,
Т2 — проверяет состояние сигналов на входа READY и HOLD,
Т3 — реализует обмен одним байтом информации с памятью или портами,
Т4/Т5 — выполняет внутренние межрегистровые передачи и обработку данных
в соответствии с командой.
Подробнее с этой информацией можно ознакомиться по следующим адресам:
http://retro.h1.ru/MK80/CPU/M80CPUi.php
http://www.danbigras.ru/MK80/CPU/M80CPUi.html
В более сложных микро-ЭВМ используют дополнительные сигналы управления, выдаваемые
микропроцессором на шину данных в тактах Т1/Т2 в виде 8-разрядного кода — байта (слова)
состояния, который по сигналу синхронизации SYNC - С запоминается (фиксируется) во
внешнем регистре и определяет действия микропроцессора в остальных тактах текущего
машинного цикла. Использование байта (слова) состояния позволяет однозначно определить,
с какой группой периферийных модулей происходит обмен данными в текущем машинном
цикле. Наличие единицы в отдельных разрядах слова состояния - STATUS является признаком
выполнения микропроцессором в текущем машинном цикле следующих действий:
ШД[0] (ППР) — обслуживание запроса прерывания;
ШД[1] (3В) — запись в память или вывод данных в порт;
ШД[2] (СТК) — обращение к области памяти, используемой в качестве стека;
ШД[3] (ОСТ) — останов микропроцессора по команде HLT,
ШД[4] (ВЫВ) — вывод данных в порт,
ШД[5] (M1) — чтение кода операции команды,
ШД[6] (ВВ) -- ввод данных из порта,
ШД[7] (ЧТП) — чтение данных из памяти.

Слово состояния - STATUS обычно обабатывается системным контроллером (К580ВК28/38)
для формирования сигналов обращения к памяти, устройствам ввода/вывода и к контроллеру
прерываний: MEMRD, MEMWR, IORD, IOWR, INTA.
Но можно сформировать эти же сигналы и более простой схемой:
Здесь сигнал СТС(STB) (от ГТИ) - это укороченный по длительности сигнал SYNC - С, пропущенный
через генератор К580ГФ24(8224) и соответствующий середине длительности STATUS.
Отметим, что сигналы MEMRD, MEMWR, IORD, IOWR формируются вентилями с открытым коллектором,
чтобы не вступать в конфликт с одноименными сигналами контроллера ПДП.
--------------------------------------
Что-то, мне кажется, эта схема выше не очень правильная в плане формирования INTA...
Вот эта - более верная, поскольку INTA - это DBIN (RD), но перенаправленный
к источнику команды прерывания...
То есть, стробом INTA процессор считывает от 1 до 3 байт, от устройства прерывания,
как делал бы это из памяти, но стробом DBIN...
А там выше они INTA из STB сделали, что меня несколько смущает...
Более конкретная, правильная схема из независимого источника:
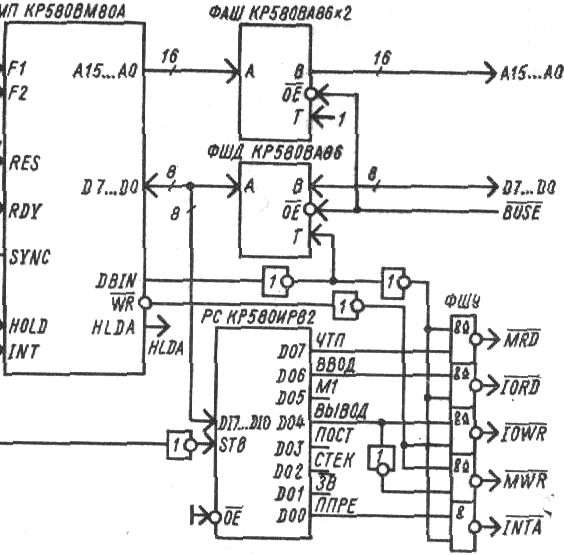
Источник: Артюхов и др. Проектирование микропроцессорной электронно-
вычислительной аппаратуры. Справочник. - Киев, 1988. с.46.




{kind=link}